



R&D/New Products



HOME R&D/New Products R&D Performance MOTION & ROBOTICS
MOTION & ROBOTICS
노칭프레스 제어시스템 개발
| 구분 | 내용 |
|---|---|
| 과제명 | 노칭프레스 제어시스템 개발 |
| 수행기간 | 2016.05 ~ 2017.05(12개월) |
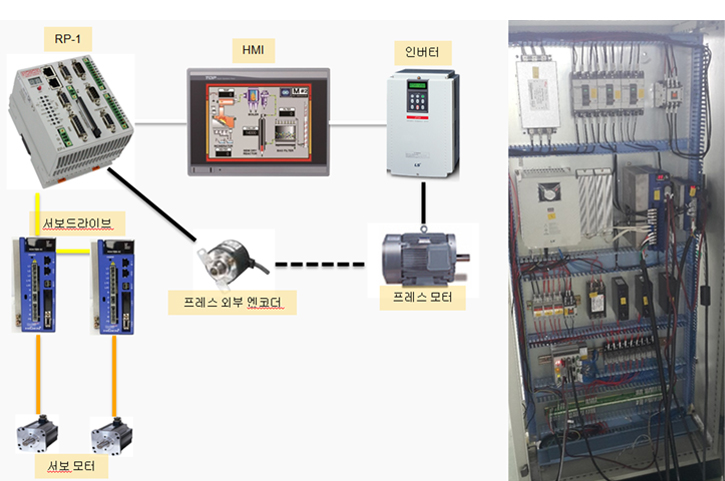
EtherCAT Network 통신으로 전장 배선 간소화 및
유지보수가 용이
프레스축과 메인 축의 동기제어
간편한 장비 설정 및 조작 인터페이스 제공
다양한 언어 지원 가능 (현재, 한국어 중국어 지원)
Skew 기능 지원
Skip 기능 지원
머신비전을 활용한 자동검사 가능 (옵션)
공정 제어기(PLC)와 연동 가능 (옵션)
| 제어기 특징 | |
|---|---|
| 제어 축 수 | 최대 32축 |
| 지원 네트워크 | EtherCAT, CANopen |
| Profibus, DeviceNet, Modbus/TCP, Ethernet | |
| 제어 주기 | 최대 1ms |
| 외부 엔코더 | 1 채널 지원 |
무대장치 제어시스템 개발
| 구분 | 내용 |
|---|---|
| 과제명 | 무대장치 제어시스템 개발 |
| 수행기간 | 2014.08 ~ 2015.03 (8개월) |
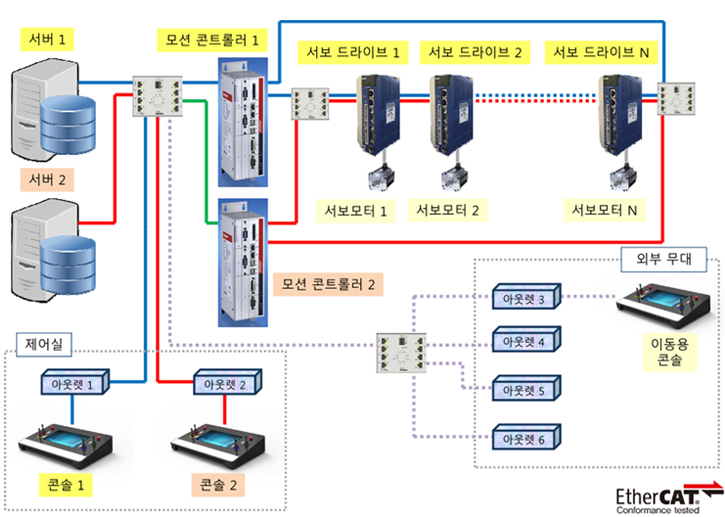
EtherCAT Network를 이용한 네트워크에 구성된 모든 축을 정확한 제어주기로 제어 가능.
여러 축을 자유 자재로 동시 제어 가능.
드라이브의 네트워크에 문제가 생겼을 경우에도 시스템이 동작 가능한 네트워크 이중화
제어기에 문제가 발생하였을 때, 대기중인 백업 제어기로 동작 가능한 제어기 이중화
콘솔이 문제가 발생하였을 때, 예비 콘솔로 전환이 가능한 서버 이중화
| 시스템 설명 | ||
|---|---|---|
| 제어기 | Beckhoff C6930 | Intel Celeron 1.9GHz, 2 Cores, 2GB DDR3 RAM, UPS(Battery Pack) Windows 7 Pro 32bit, TwinCAT NC PTP, EtherCAT Redundancy 250 |
| 제어 축수 | 43축(상부 배튼 39축, 하부 리프트 2축) | |
| 제어 네트워크 | EtherCAT, RT-Ethernet | |
| 제어 주기 | 1ms | |
| 엔코더 | 기계식 절대치 엔코더(배터리 X) | |
생산자동화를 위한 표준지향 한국형 모션 플랫폼(KOSMOS)기반 GMC
| 구분 | 내용 |
|---|---|
| 과제명 | 생산자동화를 위한 표준지향 한국형 오픈소스 모션 플랫폼 기반 범용 모션 제어기 개발 (Development of GMC based on Standardized KOSMOS(Korea Open Source Motion System) for Automated Manufacturing) |
| 수행기간 | 2014.05~2017.05(36개월) |

